
发布时间:2026-06-16 08:32:06

作者:小编

阅读:
现代工业自动化的升级核心,是让机械设备具备类似人类的感知与判断能力,摆脱传统固定程序的刚性作业模式。力传感器作为一类核心感知元器件,能够精准捕捉拉力、压力、扭矩、载荷等力学变化,将物理受力信号转化为可被控制系统识别的电信号,是机械设备实现力学感知、精准调控、智能作业的基础载体。在众多应用领域中,机器人抓取作业与工业称重场景是力传感器最核心、最普及的应用场景,直接决定自动化作业的精准度、稳定性与安全性。
无论是精密小件的柔性抓取、复杂工况的自适应作业,还是工业物料的精准称重、载荷监测,都离不开力传感器的支撑。本文将全面拆解力传感器的基础原理、核心分类、重点应用场景,深度解析其在机器人抓取与工业称重中的核心作用、技术价值与使用要点,同时拓展其延伸应用领域,完整展现这款工业核心元件的实用价值。

1.1 力传感器基础工作原理
1.1.1 信号转化核心逻辑
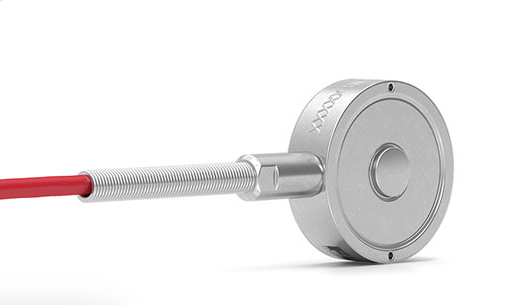
力传感器的核心工作逻辑统一为“力学感知-形变转化-信号输出”。设备核心由弹性体、感应元件与信号处理电路三部分组成,当外界力学作用施加在传感器表面时,高强度弹性体将产生规律性的微量弹性形变,且形变程度与受力大小呈现稳定对应关系。附着在弹性体表面的感应元件会随形变同步发生物理参数变化,进而将机械形变转化为电学信号波动。后续通过专属电路完成信号放大、滤波、补偿与校正,最终输出标准化、可量化的电信号,供控制系统识别、计算与调控。
1.1.2 主流转化技术机制
目前工业场景中应用最广泛的是电阻应变式转化技术,依托导体与半导体的应变效应实现信号转化。感应元件在受力拉伸或压缩时,内部结构发生细微变化,引发电阻值的稳定偏移,再通过惠斯通电桥结构将电阻变化转化为电压信号输出,整体线性度稳定、重复性良好,适配绝大多数常规工业场景。除此之外,压电式、电容式等技术机制也会根据场景需求灵活应用,分别适配动态高频测力、微小载荷精准检测等细分工况。
1.2 工业常用力传感器核心分类
1.2.1 按受力维度分类
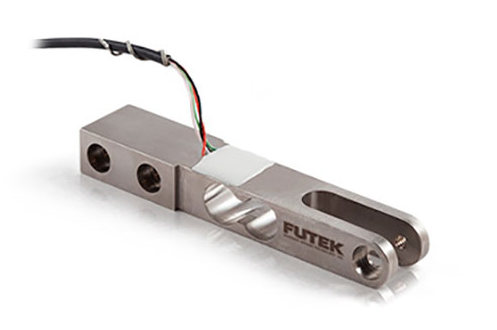
单维力传感器主要用于检测单一方向的拉力或压力,结构简洁、稳定性强,多用于工业静态称重、单向载荷监测等基础场景,是工业称重体系的常用类型。多维力传感器可同步捕捉多个方向的作用力与力矩,能够适配机器人复杂姿态调整、曲面贴合、精密装配等多维度受力场景,满足柔性自动化作业的多元感知需求。
1.2.2 按作业状态分类
静态测力传感器适用于缓慢受力、恒定载荷的静态工况,擅长稳定称重、静态压力监测等场景,抗环境漂移能力强,长期检测精度稳定。动态测力传感器针对高频变化、瞬时冲击的动态受力场景设计,响应速度更快,可捕捉瞬时力学波动,适配机器人动态抓取、高速装配、冲击载荷检测等动态作业场景。
1.2.3 按结构材质分类
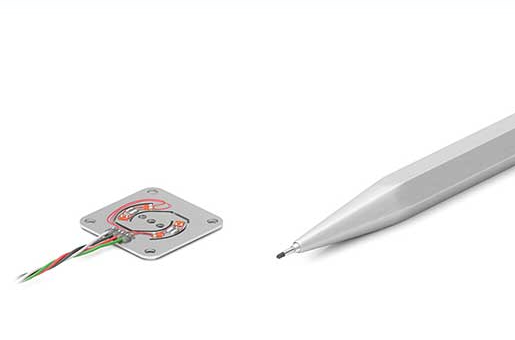
金属材质力传感器刚性强、抗冲击性好、耐磨耐用,适配重工业称重、大载荷抓取等严苛工况。硅基微型传感器体积小巧、灵敏度高,适合精密电子制造、微型工件抓取等狭小空间、微载荷检测场景,能够满足精细化作业的感知需求。
2.1 赋予机器人柔性抓取感知能力
2.1.1 解决刚性作业的固有缺陷
传统无传感机器人抓取依靠固定行程与预设力度作业,属于刚性作业模式。面对材质柔软、易碎、易变形的工件,容易出现抓取力度过大导致工件破损、挤压变形的问题;面对尺寸偏差、摆放偏移的工件,又会因力度不足出现滑落、抓取不稳的情况。力传感器的搭载,让机器人具备了类似人类手部的触觉感知能力,彻底打破固定程序的作业局限,实现自适应柔性抓取。
2.1.2 实时力度自适应调控
力传感器安装于机器人末端执行器位置,可实时感知抓取过程中的接触力度、夹持压力与受力变化。在抓取接触工件的瞬间,传感器快速捕捉力学信号并同步传输至控制系统,系统根据实时受力数据动态调整夹持力度与动作速度。针对不同材质、不同硬度的工件自动匹配适配力度,既保障抓取夹持的稳定性,又有效保护工件完好,适配各类异形、易碎、精密工件的抓取作业。
2.2 适配多场景机器人精细化作业
2.2.1 精密电子工件抓取
电子元器件、精密芯片、微型零部件等产品体积小、材质脆、结构精密,轻微的挤压、磕碰都会造成产品报废。搭载高灵敏度力传感器的机器人,可实现微力度精准夹持,精准把控接触压力,杜绝过度挤压造成的元件破损,同时避免力度不足导致的搬运脱落,保障精密小件批量生产的良品率与作业稳定性。
2.2.2 柔性物料与易碎品抓取
食品、软性塑胶、玻璃制品、陶瓷工件等物料,对抓取力度的容错率极低。力传感器可实时反馈夹持状态,当检测到受力异常时及时调整动作,实现轻柔稳定抓取,有效降低柔性物料变形、易碎工件破损的概率,适配轻工制造、食品加工等行业的柔性作业需求。
2.2.3 重型工件稳定抓取
工业重型构件、金属型材、机械配件的抓取搬运中,力传感器可实时监测载荷变化,及时识别抓取偏移、受力不均、负载异常等问题。一旦检测到受力失衡、载荷超限,系统可及时停机调整姿态,避免工件滑落、设备过载等安全隐患,提升重型自动化作业的安全性与可靠性。
2.3 辅助机器人装配与贴合作业
2.3.1 精密间隙装配调控
工业装配作业对贴合力度、插入深度、对接精度要求极高,过大力度会造成部件卡损、结构变形,力度不足则会出现装配间隙、贴合不严的问题。力传感器可实时监测装配过程的顶压力、贴合力,辅助机器人完成精准对位、匀速贴合、适度压紧,保障装配工艺的一致性与精准度,提升产品装配质量。
2.3.2 姿态自适应修正
在曲面贴合、异形工件对接、复杂结构装配场景中,单一方向受力无法保障作业效果。多维力传感器可同步捕捉多方向受力与力矩变化,辅助机器人实时调整作业姿态、角度与力度,自动修正对位偏差,完成复杂工况下的精准装配与贴合作业,拓展机器人的作业适配范围。
2.4 机器人作业安全防护功能
自动化机器人高速作业过程中,意外碰撞、突发阻力、工件卡顿等问题时有发生。力传感器可实时监测异常受力波动,当检测到突发冲击、阻力超限、非正常受力时,快速向控制系统反馈信号,触发设备减速、停机、复位等保护机制,有效避免机器人本体、作业工件、周边设备出现碰撞损坏,为自动化生产线提供基础安全防护。
3.1 工业精准称重的核心支撑元件
3.1.1 静态物料精准计量
工业称重是生产配料、物料统计、库存核算、质量管控的基础环节,传统人工称重效率低、误差大、重复性差。力传感器作为工业称重设备的核心感应单元,可将物料重力转化为稳定电学信号,经过算法校正与信号处理后,输出精准的重量数据,实现物料静态精准称重。广泛应用于原料入库计量、成品出库称重、批次物料核验等基础工况,提升工业计量的精准度与规范性。
3.1.2 动态在线连续称重
流水线自动化生产需要实现物料不间断在线称重,静态称重模式无法适配连续作业需求。适配动态工况的力传感器可实时捕捉输送过程中的物料载荷变化,动态完成重量采集、数据更新与统计,实现流水线连续在线称重、分选、分级,适配自动化生产线的高效作业节奏,助力生产流程全自动化升级。
3.2 生产配料与工艺精准管控
3.2.1 多组分精准配比
化工、建材、食品、医药等行业的生产工艺,对原料配比精度要求较高,配比偏差会直接影响成品性能与品质。力传感器搭载自动化配料系统,可精准控制各类原料的下料重量,按照工艺标准完成定量配料,保障每一批次原料配比的一致性,从源头稳定生产工艺与成品质量。
3.2.2 工艺载荷实时监控
部分工业加工工艺需要精准控制加工压力、压制载荷、成型力度,载荷过大或过小都会影响工件成型效果。力传感器可实时监测工艺过程中的载荷变化,为压力加工、模压成型、压实加工等工艺提供精准数据支撑,辅助系统实时调控工艺参数,保障加工工艺的标准化与精准化。
3.3 载荷监测与设备安全管控
3.3.1 设备过载防护
起重设备、输送设备、承压设备的过载运行,是工业生产的常见安全隐患。力传感器可实时监测设备承载载荷,精准识别过载、超载工况,及时反馈信号并触发报警、限载、停机等防护动作,杜绝设备超负荷运行引发的故障与安全问题,保障工业设备长期稳定运行。
3.3.2 物料缺料与堵料监测
在自动化送料、储料工况中,力传感器可通过重量变化判断储料状态与送料进度,实现缺料预警、满料停机、堵料检测等功能。当物料重量低于设定区间时触发补料提醒,物料堆积超重时及时停机排查,保障自动化送料系统持续稳定运行,减少生产中断概率。
3.4 产品质检与分级筛选
重量是工业产品质量检测的重要指标,成品重量偏差可直接反映产品填充量、装配完整性、物料配比的合规性。力传感器配合自动化筛选设备,可快速完成批量产品的重量检测,自动区分合格产品、超重次品、缺量次品,实现产品自动化质检与分级分拣,大幅提升质检效率与筛选精度,降低人工质检的误差与成本。
4.1 精密加工与打磨抛光
机器人打磨、抛光、切削加工过程中,加工压力的稳定性直接决定工件表面加工精度。力传感器可实时监测加工接触力,动态调整加工力度与进给速度,避免压力过大造成工件过度打磨、表面损伤,或压力不足导致打磨不彻底、加工不均匀,保障精密加工的工艺精度与表面质量一致性。
4.2 新能源与精密测试
新能源零部件装配、电池压力测试、精密结构力学性能检测等场景,需要精准捕捉微小力学变化。高精密力传感器可完成微载荷、高精度的力学检测,为产品性能测试、质量验证、工艺优化提供精准数据支撑,适配高端精密制造的检测需求。
4.3 智能仓储与物流分拣
智能仓储的物料盘点、物流分拣的重量分级、快递包裹称重等场景,均依托力传感器实现自动化作业。传感器快速采集物料重量数据,配合分拣系统完成分类、入库、统计,实现仓储物流环节的自动化、精细化管控,提升仓储物流运转效率。
5.1 感知精度高,适配精细化作业
经过工艺优化与算法补偿的力传感器,能够精准捕捉微小力学变化,无论是机器人微力度抓取、精密装配,还是工业微量配料、小重量质检,都能保持稳定的检测精度,有效降低作业误差,满足现代工业精细化生产的核心需求。
5.2 动态响应快,适配自动化节奏
力传感器信号转化与输出流程高效顺畅,可快速响应瞬时力学变化,适配机器人高速作业、流水线动态称重、实时载荷调控等动态工况,数据更新实时、无明显滞后,匹配自动化生产线的高效作业节奏。
5.3 稳定性优异,适配复杂工业工况
工业级力传感器经过材质优化、结构加固、温度补偿与抗干扰设计,能够适应高低温波动、轻微震动、电磁干扰、粉尘潮湿等复杂工业环境,长期作业无明显性能漂移,重复性良好,可满足工业场景长期连续运行的需求。
5.4 适配性广泛,可灵活集成配套
力传感器结构规格丰富,体积可大可小,能够灵活集成于机器人末端执行器、自动化称重设备、加工设备、仓储设备等各类工业装置中,适配不同场景、不同设备、不同工况的配套需求,兼容性与拓展性较强。
6.1 场景化精准选型原则
6.1.1 匹配载荷与受力类型
选型时需结合实际工况的最大受力范围、受力形式选择对应规格的传感器,避免量程过小导致过载损坏,或量程过大降低微小力检测精度。静态称重场景优选静态载荷传感器,机器人动态作业、冲击受力场景优选动态响应型传感器,保障工况适配性。
6.1.2 适配环境工况条件
高温、高湿、粉尘、腐蚀性介质、强电磁干扰等复杂环境,需选用具备对应防护能力、温度补偿、抗干扰设计的工业级力传感器。精密室内工况可选用高灵敏度微型传感器,保障不同环境下的作业稳定性与检测精度。
6.2 规范安装减少检测误差
力传感器的安装精度直接影响受力检测效果,安装倾斜、受力偏心、固定过紧或过松,都会引发数据偏差与受力不均。安装过程中需保障传感器受力方向与实际载荷方向一致,固定平稳无松动,避免额外机械应力干扰,杜绝安装带来的系统性误差。同时远离强震动、强热源、强电磁干扰区域,优化作业环境。
6.3 定期校准与日常维护
长期连续作业会让传感器产生轻微的应力累积、零点漂移,影响检测精度。日常使用中需定期清理传感器表面粉尘、油污、杂物,保持受力面清洁无遮挡。按照周期完成零点校准、精度校验,修正长期运行产生的微小误差。针对高频冲击、重载工况的传感器,定期检查结构完整性,及时排查老化、形变、松动等隐患,延长设备使用寿命。
结语
在工业自动化向精细化、智能化、柔性化升级的进程中,力传感器的核心价值愈发凸显,是机械设备实现力学感知、摆脱刚性作业、完成精准控制的关键核心元件。其应用场景覆盖广泛,其中机器人抓取与工业称重是最基础、最核心的两大应用领域,分别支撑起自动化柔性作业与工业精准计量两大生产体系。
在机器人作业场景中,力传感器赋予设备柔性触觉能力,解决了传统刚性抓取破损、滑落、适配性差的行业难题,让机器人可适配精密、易碎、异形、重型等各类工件的抓取与装配作业,大幅提升自动化作业的精度、安全性与适配范围。在工业称重场景中,力传感器实现了工业物料静态计量、动态称重、精准配料、质量质检、载荷防护的全流程精准管控,为生产工艺稳定、产品质量把控、设备安全运行提供坚实的数据支撑。
除此之外,力传感器在精密加工、智能仓储、精密测试等延伸场景的广泛应用,进一步完善了工业自动化的感知体系,助力生产环节的精细化管控。凭借高精度、快响应、高稳定、强适配的综合特性,力传感器已经成为现代工业生产不可或缺的核心元器件。
合理选型、规范安装、定期养护力传感器,能够持续保障设备检测精度与作业稳定性,最大化发挥其应用价值。随着智能制造技术的持续迭代,力传感器的感知精度、动态性能、环境适配能力还将持续优化,在更多精细化、智能化工业场景中发挥核心作用,持续赋能工业自动化产业的升级与发展。


 电话020-85262155
电话020-85262155 邮箱sales@omgl.com.cn
邮箱sales@omgl.com.cn